Boccia
Boccia is a precision sport in which the objective is to get a ball as close as possible to a target. In its most adapted form, Boccia allows for the use of a ramp to assist the user. The proposed system consists of a BCI-enabled ramp that can be controlled by the user’s brain signals using a visual control paradigm (i.e., P300, or SSVEP). The project is divided into three main components:
Hardware
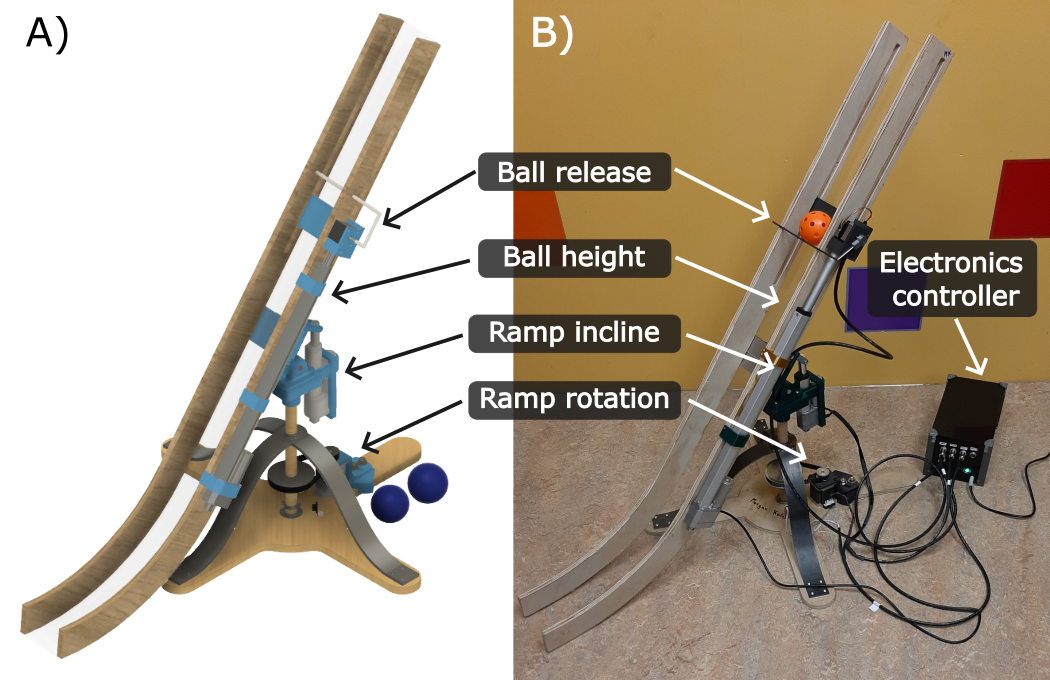
The design of the ramp was based on commercially available Boccia ramps (Fig. 1). We selected light wood materials for the base and railings, and metal supports for the main shaft. Additionally, we used a clear acrylic for the back of the ramp so the used can see the ball rolling through. Custom 3D printed parts are used to hold the motors and sensors in place.
The files of the hardware are stored in two locations:
- The files for the computer aided design (CAD) model of the ramp are hosted on
Daniel Comaduran Marquez Fusion 360 academic account. Access to these files can be requested. - The schematics for the electronics controller are in the boccia-hardware-firmware repo.
Firmware
All motors are controlled using an Arduino MEGA microcontroller. Currently, there are four motions of the ramp that can be controlled: rotation, incline, and elevation and release of the ball. The incline and elevation are controlled by linear actuators, and the rotation and release are controlled by stepper motors. The linear actuators have a potentiometer that reports the position of the actuator. The stepper motors use external optical sensors to determine when the limite in the range of motion has been reached. Note that the exact position of the stepper motors is unknown and can only be estimated.
The source code for the firmware can be found in the boccia-hardware-firmware repo.
Software
The software is based on the bci-essentials-python and bci-essentials-unity packages developed in the lab.
TODO: Describe this section after re-doing the software portion of the project